KOREAN
KOREAN ENGLISH
ENGLISHCopyright(c) 2020 SMART C&S.co,.LTD
All rights reserved.
Copyright(c) 2020 SMART C&S.co,.LTD
All rights reserved.

The hangers of suspension bridges and cables of cable-stayed bridges in operation face challenges in accessibility and safety, making direct visual inspections difficult. By developing an inspection robot to improve accessibility, and incorporating a lightweight design and a convenient attachment method, we aim to enhance reliability reducing time and costs.
| Cable diameter | 140 ~ 315mm |
|---|---|
| Resolution | Full HD (1920 X 1080) X 4ea |
| Maximum velocity | 0.2m/s |
| Weight | 17kg |
| Setup of device | By 2 persons |
| Minimal distance to nearby cable | 30 ~ 40cm |
| Wireless Communication Range | 4km |
| Camera system | 4ea |
| Drive system | Self-driven |
| IP Rating | IP58 |
| Battery | 5000mA Li-Polymer intelligent battery X 4ea |

Check the normal functions of main parts such as wheels, cameras and wireless communication

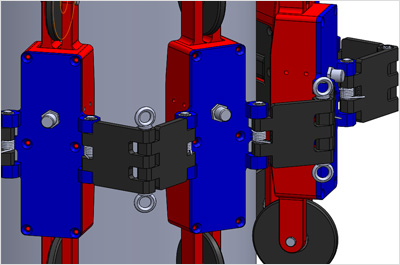
Two persons can easily and safely fasten the robot to the cable because the weight of it is only 17kg, and the wheels of the robot are adjusted for the diameter of cable

Check the normal functions of main parts such as wheels, cameras and wireless communication

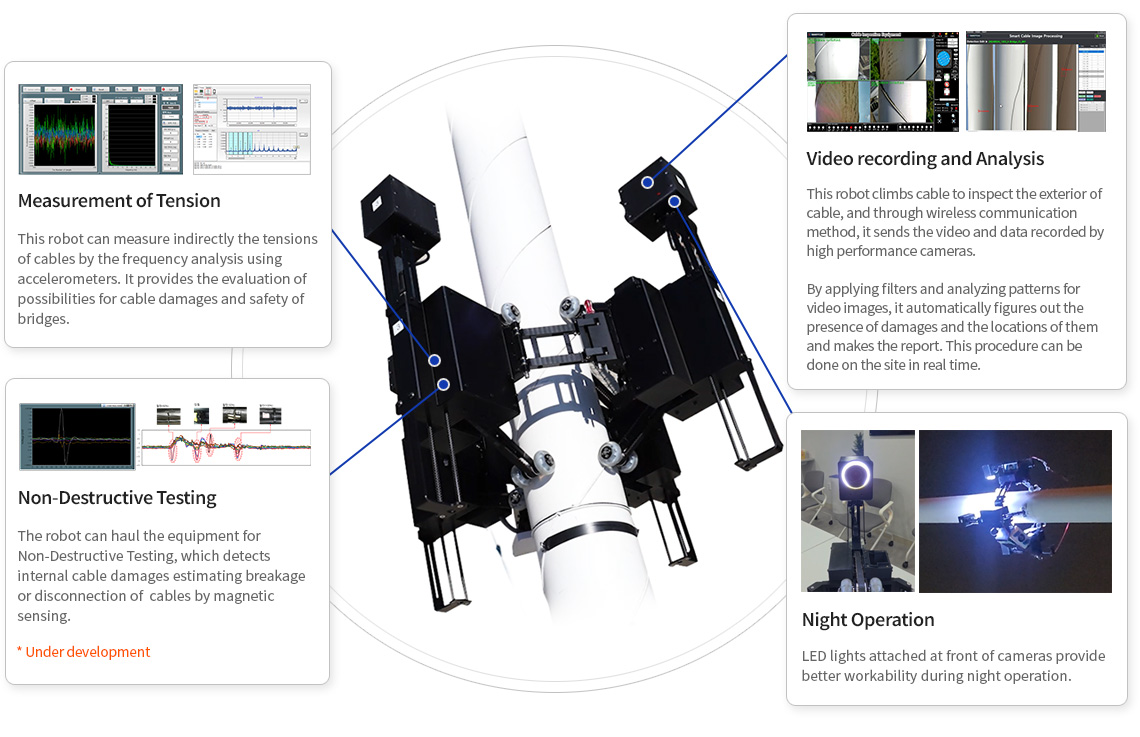
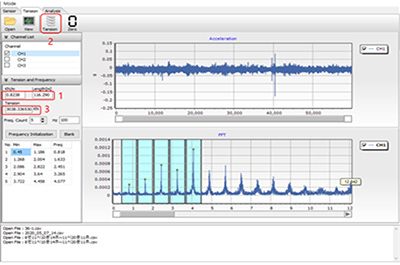
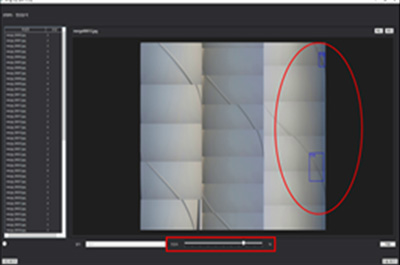
The video recorded by robot is checked by the labtop computer on the site in the real time and the sheets of result are made by the analysis program

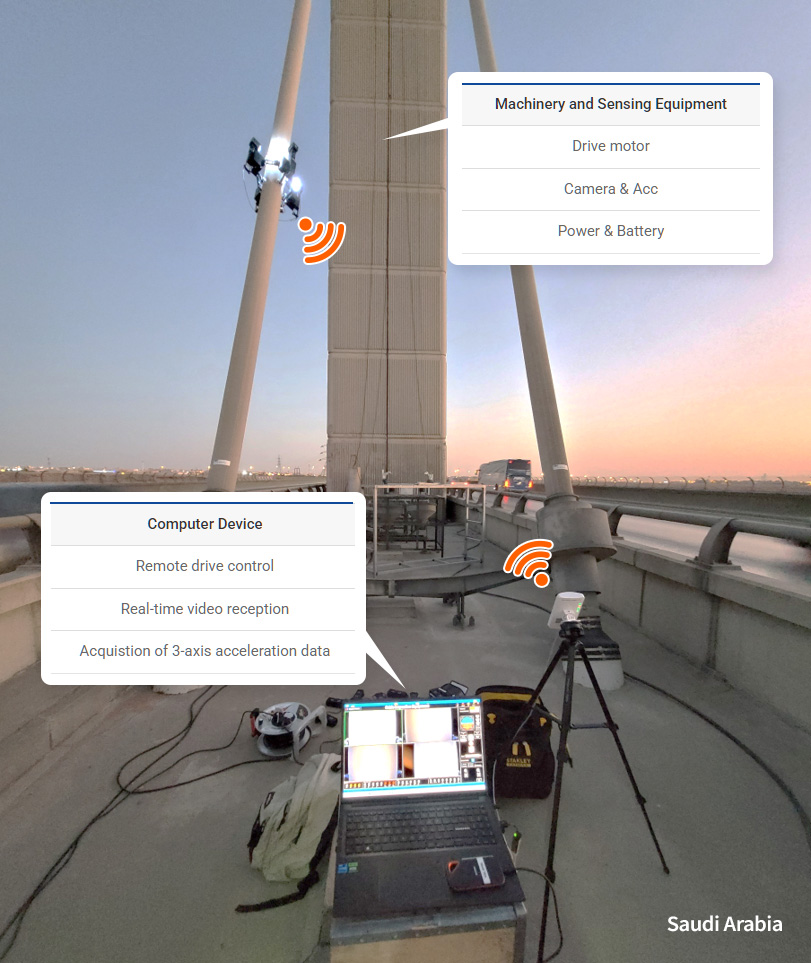
The measured data is automatically reported to the manager's PC via wireless communication for efficient monitoring and recordkeeping.

Public Sector

Private Sector