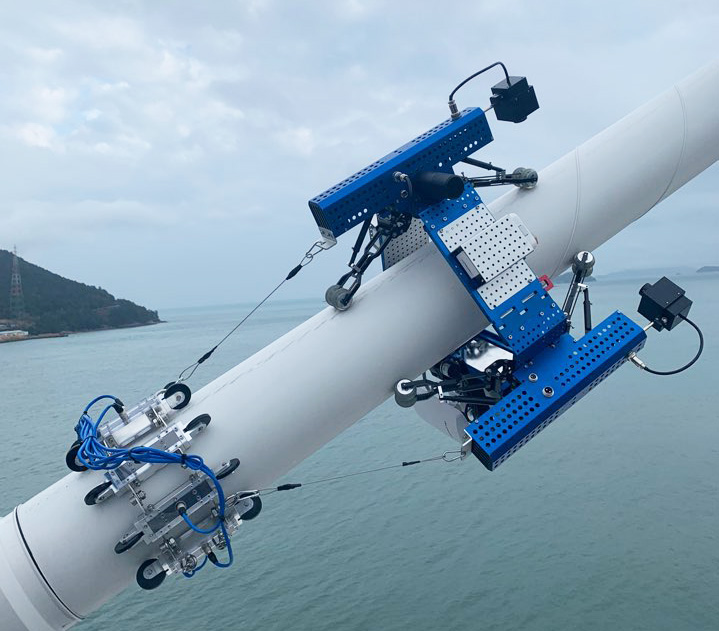
케이블 교량 안전점검 및 유지관리를 위한 케이블 등반 로봇
공용중에 있는 현수교 행어와 사장교 케이블은 위치적 접근성과 안전성의 문제로 작업자의 직접적인 육안 점검이나 케리어를 이용한 점검이 매우 위험합니다. 또한 이동성의 한계로 인하여 완벽한 점검이 불가능하며 그로인해 점검에 많은 시간과 비용이 발생되어 왔습니다.
본 장비는 이러한 케이블 점검의 접근성을 해결하고, 교량점검의 신뢰성과 시간적, 재정적 비용 절감이 가능하도록 개발되었습니다.



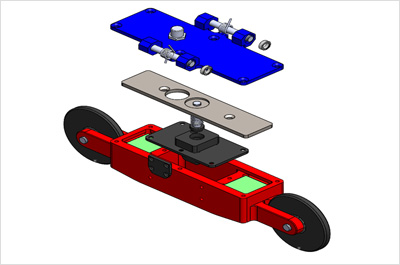
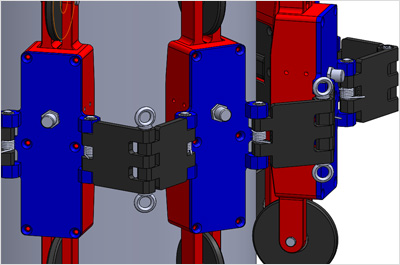
로봇 상세 구성 설명
| 항목 | 사양 |
|---|---|
| Totla Weight | 12.78kg(배터리 장착시) |
| Chassis | Duralumin |
| 통신 | Wi-Fi 5GHz |
| 전원 | DC 12~24V Pasive PoE (LAN/PoE port) |
| 카메라 | FULL HD (1920 x 1080) 화질 x 3개 Frame Rate : 10FPS(Frames Per Second) |
| 등반속도 | 약 0.18m/s |
| 케이블직경대응 | 50mm ~ 30mm |
| 등반경사도 | 0도 ~ 90도 |
| 로봇 컨트롤 | Application |
| Sensor | 3-axis Acceleometer |
시스템구성
| Machinery and Sensing Equipment |
|---|
| Drive motor |
| Camera & Acc |
| Power & Battery |

| Computer Device |
|---|
| Remote drive control |
| Real-time video reception |
| Acquistion of 3-axis acceleration data |

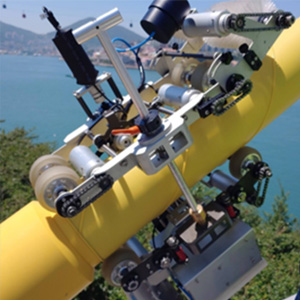
작업 절차 및 현장적용




케이블 점검로봇 구동 동영상
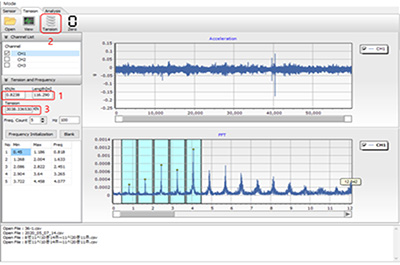
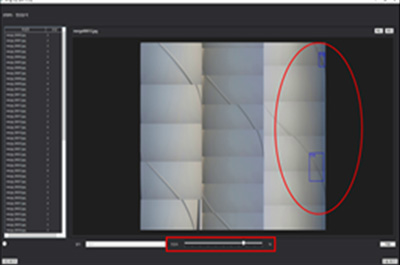
측정 및 분석 프로그램
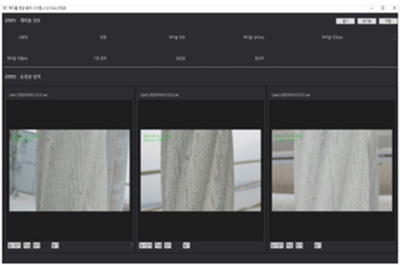
자기센서 방식의 케이블 내부 상태 조사 장치
현장적용 사진









 KOREAN
KOREAN ENGLISH
ENGLISH